この記事ではRC並列回路の『合成インピーダンス』について
- RC並列回路の『合成インピーダンス』の式・大きさ・ベクトル図・インピーダンス角
などを図を用いて分かりやすく説明するように心掛けています。ご参考になれば幸いです。
RC並列回路の『合成インピーダンス』
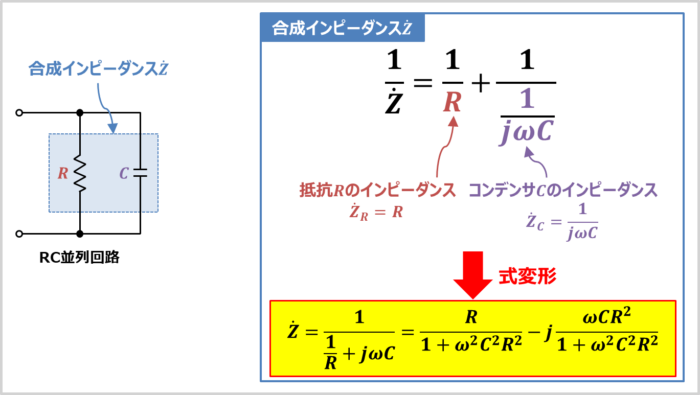
RC並列回路は上図に示すように、抵抗\(R\)とコンデンサ\(C\)を並列に接続した回路です。
抵抗\(R\)の抵抗値を\(R{\mathrm{[{\Omega}]}}\)、コンデンサ\(C\)の静電容量を\(C{\mathrm{[F]}}\)とします。この時、抵抗\(R\)のインピーダンス\({\dot{Z}_R}\)とコンデンサ\(C\)のインピーダンス\({\dot{Z}_C}\)はそれぞれ次式で表されます。
\begin{eqnarray}
{\dot{Z}_R}&=&R\tag{1}\\
\\
{\dot{Z}_C}&=&-jX_C=-j\frac{1}{{\omega}C}=\frac{1}{j{\omega}C}\tag{2}
\end{eqnarray}
(2)式において、\(X_C\)は容量性リアクタンス(コンデンサ\(C\)の抵抗成分)と呼ばれています。また、\({\omega}\)は角周波数(角速度とも呼ばれる)であり、\({\omega}=2{\pi}f\)の関係があります。
なお、リアクタンスについては下記の記事で詳しく説明していますので、参考になると幸いです。
あわせて読みたい
『リアクタンス』については下記の記事で詳しく説明しています。興味のある方は下記のリンクからぜひチェックをしてみてください。 続きを見る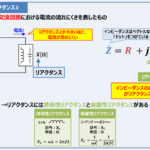
【リアクタンスとは】『単位』や『計算方法』などのまとめ!
『それぞれのインピーダンスの逆数の和』が『RC並列回路の合成インピーダンス\({\dot{Z}}\)の逆数』となるため、次式が成り立ちます。
\begin{eqnarray}
\frac{1}{{\dot{Z}}}&=&\frac{1}{{\dot{Z}_R}}+\frac{1}{{\dot{Z}_C}}\\
\\
&=&\frac{1}{R}+\frac{1}{\displaystyle\frac{1}{j{\omega}C}}\\
\\
&=&\frac{1}{R}+j{\omega}C\\
\\
&=&\frac{1+j{\omega}CR}{R}\tag{3}
\end{eqnarray}
(3)式の分母と分子をひっくり返すと次式となります。
\begin{eqnarray}
{\dot{Z}}=\frac{1}{\displaystyle\frac{1}{R}+j{\omega}C}=\frac{R}{1+j{\omega}CR}\tag{4}
\end{eqnarray}
また、(4)式には分母に虚数単位\(j\)があります。分子のみに虚数単位\(j\)があるようにするために、分母と分子に『\(1-j{\omega}CR\)』を掛けます。
\begin{eqnarray}
{\dot{Z}}&=&\frac{R(1-j{\omega}CR)}{(1+j{\omega}CR)(1-j{\omega}CR)}\\
\\
&=&\frac{R-j{\omega}CR^2}{1-j{\omega}CR+j{\omega}CR-j^2{\omega}^2C^2R^2}\\
\\
&=&\frac{R-j{\omega}CR^2}{1+{\omega}^2C^2R^2}\\
\\
&=&\frac{R}{1+{\omega}^2C^2R^2}-j\frac{{\omega}CR^2}{1+{\omega}^2C^2R^2}\tag{5}
\end{eqnarray}
以上より、RC並列回路の合成インピーダンス\({\dot{Z}}\)は次式となります。
RC並列回路の合成インピーダンス
\begin{eqnarray}
{\dot{Z}}=\frac{1}{\displaystyle\frac{1}{R}+j{\omega}C}=\frac{R}{1+{\omega}^2C^2R^2}-j\frac{{\omega}CR^2}{1+{\omega}^2C^2R^2}{\mathrm{[{\Omega}]}}\tag{6}
\end{eqnarray}
RC並列回路の『合成インピーダンス』の大きさ
先ほど次式で表される合成インピーダンス\({\dot{Z}}\)を求めました。
\begin{eqnarray}
{\dot{Z}}=\frac{R}{1+{\omega}^2C^2R^2}-j\frac{{\omega}CR^2}{1+{\omega}^2C^2R^2}{\mathrm{[{\Omega}]}}\tag{7}
\end{eqnarray}
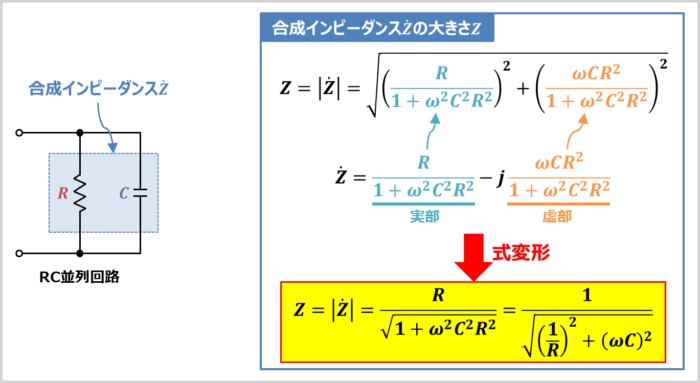
RC並列回路の合成インピーダンスの大きさ\(Z\)は(7)式の合成インピーダンス\({\dot{Z}}\)の絶対値となります。
もう少し詳しく説明すると、合成インピーダンスの大きさ\(Z\)は(7)式において、『実部\(\displaystyle\frac{R}{1+{\omega}^2C^2R^2}\)の2乗』と『虚部\(\displaystyle\frac{{\omega}CR^2}{1+{\omega}^2C^2R^2}\)の2乗』を足して、平方根を取ることで求めることができ、式で表すと次式となります。
\begin{eqnarray}
Z&=&|{\dot{Z}}|\\
\\
&=&\displaystyle\sqrt{\left(\displaystyle\frac{R}{1+{\omega}^2C^2R^2}\right)^2+\left(\displaystyle\frac{{\omega}CR^2}{1+{\omega}^2C^2R^2}\right)^2}\\
\\
&=&\displaystyle\sqrt{\displaystyle\frac{R^2+{\omega}^2C^2R^4}{\left(1+{\omega}^2C^2R^2\right)^2}}\\
\\
&=&\displaystyle\sqrt{\displaystyle\frac{R^2\left(1+{\omega}^2C^2R^2\right)}{\left(1+{\omega}^2C^2R^2\right)^2}}\\
\\
&=&\displaystyle\sqrt{\displaystyle\frac{R^2}{1+{\omega}^2C^2R^2}}\\
\\
&=&\displaystyle\frac{R}{\displaystyle\sqrt{1+{\omega}^2C^2R^2}}\\
\\
&=&\displaystyle\frac{1}{\displaystyle\sqrt{\left(\displaystyle\frac{1}{R}\right)^2+\left({\omega}C\right)^2}}\tag{8}
\end{eqnarray}
以上より、RC並列回路の合成インピーダンスの大きさ\(Z\)は次式となります。
RC並列回路の合成インピーダンスの大きさ
\begin{eqnarray}
Z=|{\dot{Z}}|=\displaystyle\frac{R}{\displaystyle\sqrt{1+{\omega}^2C^2R^2}}=\displaystyle\frac{1}{\displaystyle\sqrt{\left(\displaystyle\frac{1}{R}\right)^2+\left({\omega}C\right)^2}}{\mathrm{[{\Omega}]}}\tag{9}
\end{eqnarray}
インピーダンスに付いている「ドット」の意味
インピーダンス(Z)の記号の上に「・(ドット)」が付き、\({\dot{Z}}\)となっているものがあります。
このドットがついた\({\dot{Z}}\)は「ベクトルですよ!」ということを表しています。
ドットが付く場合(\({\dot{Z}}\)など)はベクトル(複素数)を表し、ドットが付かない場合(\(Z\)など)はベクトルの絶対値(大きさ、長さ)を表しています。
詳しくは下記の記事で説明していますので、ご参考になれば幸いです。 続きを見る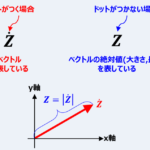
【交流回路とベクトル】インピーダンスなどにつく「・(ドット)」の意味!
RC並列回路の『合成インピーダンス』のベクトル図
RC並列回路の合成インピーダンス\({\dot{Z}}\)の『ベクトル図』は下記のステップで描くことができます。
『ベクトル図』の描き方
- 合成インピーダンス\({\dot{Z}}\)の実部のインピーダンス\({\dot{Z}_{RE}}\)のベクトルを描く
- 合成インピーダンス\({\dot{Z}}\)の虚部のインピーダンス\({\dot{Z}_{IM}}\)のベクトルを描く
- 各ベクトルを合成する
では各ステップについて順番に説明していきます。
合成インピーダンス\({\dot{Z}}\)の実部のインピーダンス\({\dot{Z}_{RE}}\)のベクトルを描く
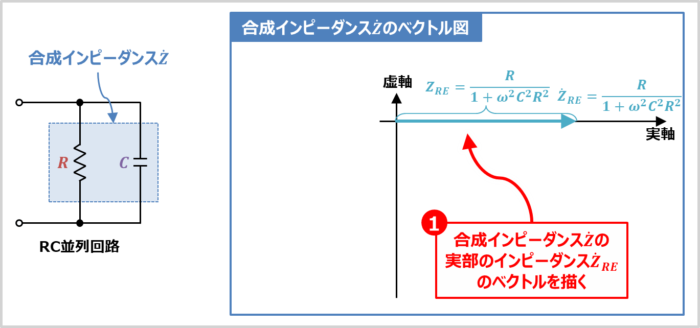
合成インピーダンス\({\dot{Z}}\)の実部のインピーダンス\({\dot{Z}_{RE}}\)は次式で表されます。
\begin{eqnarray}
{\dot{Z}_{RE}}=\frac{R}{1+{\omega}^2C^2R^2}\tag{10}
\end{eqnarray}
そのため、実部のインピーダンス\({\dot{Z_{RE}}}\)のベクトル方向は実数軸の向きとなります。ベクトルの向きの決め方については後ほど詳しく説明します。
また、実部のインピーダンス\({\dot{Z}_{RE}}\)のベクトルの大きさ(長さ)\(Z_{RE}\)は次式となります。
\begin{eqnarray}
Z_{RE}=|{\dot{Z}_{RE}}|=\displaystyle\sqrt{\left(\frac{R}{1+{\omega}^2C^2R^2}\right)^2}=\frac{R}{1+{\omega}^2C^2R^2}\tag{11}
\end{eqnarray}
合成インピーダンス\({\dot{Z}}\)の虚部のインピーダンス\({\dot{Z}_{IM}}\)のベクトルを描く
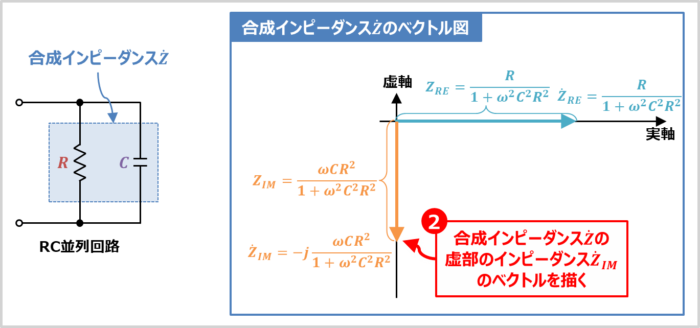
合成インピーダンス\({\dot{Z}}\)の虚部のインピーダンス\({\dot{Z}_{IM}}\)は次式で表されます。
\begin{eqnarray}
{\dot{Z}_{IM}}=-j\frac{{\omega}CR^2}{1+{\omega}^2C^2R^2}\tag{12}
\end{eqnarray}
そのため、虚部のインピーダンス\({\dot{Z}_{IM}}\)のベクトル方向は実数軸を時計周りに90°回転した向きになります(『\(-j\)』が付くと時計周りに90°回転します)。ベクトルの向きの決め方については後ほど詳しく説明します。
また、虚部のインピーダンス\({\dot{Z}_{IM}}\)のベクトルの大きさ(長さ)\(Z_{IM}\)は次式となります。
\begin{eqnarray}
Z_{IM}=|{\dot{Z}_{IM}}|=\displaystyle\sqrt{\left(\frac{{\omega}CR^2}{1+{\omega}^2C^2R^2}\right)^2}=\frac{{\omega}CR^2}{1+{\omega}^2C^2R^2}\tag{13}
\end{eqnarray}
各ベクトルを合成する
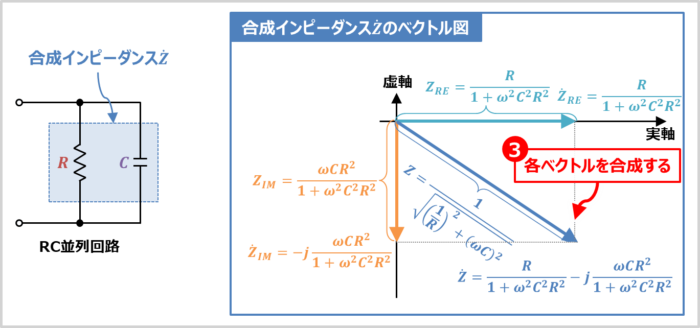
『実部のインピーダンス\({\dot{Z_{RE}}}\)』と『虚部のインピーダンス\({\dot{Z}_{IM}}\)』のベクトルの合成が RC並列回路の合成インピーダンス\({\dot{Z}}\)のベクトル図となります。
RC並列回路の合成インピーダンス\({\dot{Z}}\)のベクトルの大きさ(長さ)\(Z\)は次式となります。
\begin{eqnarray}
Z=|{\dot{Z}}|=\displaystyle\frac{R}{\displaystyle\sqrt{1+{\omega}^2C^2R^2}}=\displaystyle\frac{1}{\displaystyle\sqrt{\left(\displaystyle\frac{1}{R}\right)^2+\left({\omega}C\right)^2}}{\mathrm{[{\Omega}]}}\tag{14}
\end{eqnarray}
RC並列回路の合成インピーダンス\({\dot{Z}}\)のベクトルの大きさ(長さ)\(Z=\displaystyle\frac{1}{\displaystyle\sqrt{\left(\displaystyle\frac{1}{R}\right)^2+\left({\omega}C\right)^2}}\)はベクトル図において三平方の定理(ピタゴラスの定理)を用いても求めることができます。
ベクトルの向きについて
ベクトルの向きの決め方についてもう少し詳しく説明します。
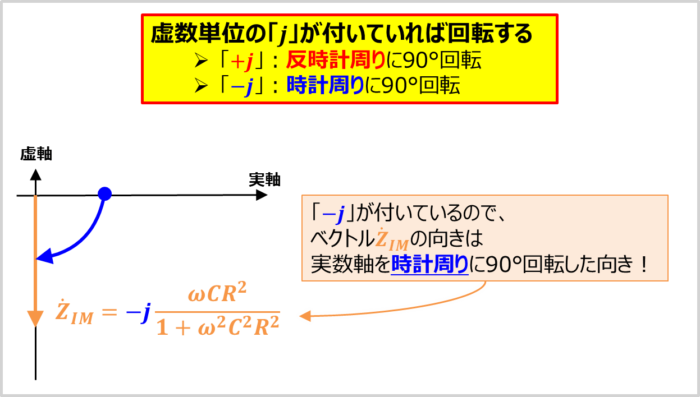
ベクトルの『向き』について
式に虚数単位『\(j\)』が付くとベクトルの向きが90°回転します。
- 『\(+j\)』が付いている時
- ベクトルは反時計周りに90°回転します。
- 『\(-j\)』が付いている時
- ベクトルは時計周りに90°回転します。
合成インピーダンス\({\dot{Z}}\)の虚部のインピーダンス\({\dot{Z}_{IM}}\)は次式で表されます。
\begin{eqnarray}
{\dot{Z}_{IM}}=-j\frac{{\omega}CR^2}{1+{\omega}^2C^2R^2}\tag{15}
\end{eqnarray}
虚部のインピーダンス\({\dot{Z}_{IM}}\)の式には『\(-j\)』が付いているので、ベクトル\({\dot{Z}_{IM}}\)の向きは実数軸を時計周りに90°回転した向きとなります。
RC並列回路の『インピーダンス角』
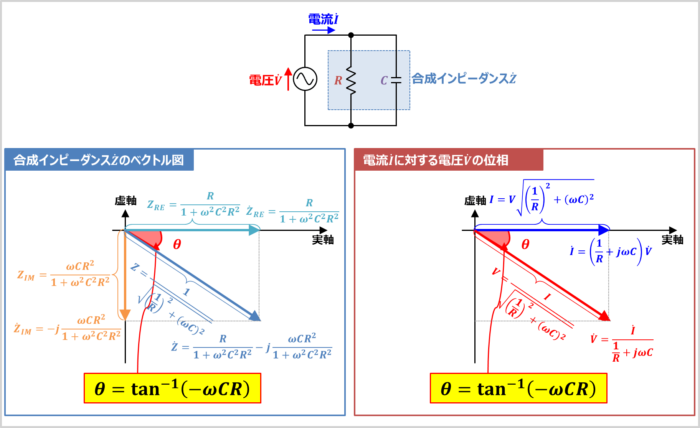
ベクトル図よりRC並列回路の『合成インピーダンス』のインピーダンス角\({\theta}\)を求めることができます。
インピーダンス角\({\theta}\)は次式で表されます。
\begin{eqnarray}
{\tan}{\theta}&=&\displaystyle\frac{-\displaystyle\frac{{\omega}CR^2}{1+{\omega}^2C^2R^2}}{\displaystyle\frac{R}{1+{\omega}^2C^2R^2}}\\
\\
&=&-{\omega}CR\\
\\
{\Leftrightarrow}{\theta}&=&{\tan}^{-1}\left(-{\omega}CR\right)\\
\\
&=&-{\tan}^{-1}\left({\omega}CR\right)\tag{16}
\end{eqnarray}
以上より、RC並列回路のインピーダンス角\({\theta}\)は次式となります。
RC並列回路のインピーダンス角
\begin{eqnarray}
{\theta}={\tan}^{-1}\left(-{\omega}CR\right)\tag{17}
\end{eqnarray}
このインピーダンス角\({\theta}\)は「RC並列回路にかかる電圧\({\dot{V}}\)」と「RC並列回路に流れる電流\({\dot{I}}\)」の位相差と等しくなります。
もう少し具体的に言うと、「RC並列回路に流れる電流\({\dot{I}}\)」に対する「RC並列回路にかかる電圧\({\dot{V}}\)」の位相となります。
また、インピーダンス\({\dot{Z}}\)は「電圧\({\dot{V}}\)と電流\({\dot{I}}\)の比」であり次式で表されます。
\begin{eqnarray}
{\dot{Z}}=\frac{{\dot{V}}}{{\dot{I}}}=\frac{1}{\displaystyle\frac{1}{R}+j{\omega}C}\tag{18}
\end{eqnarray}
したがって、「RC並列回路にかかる電圧\({\dot{V}}\)」と「RC並列回路に流れる電流\({\dot{I}}\)」は次式で表すことができます。
\begin{eqnarray}
{\dot{V}}&=&{\dot{Z}}{\dot{I}}=\displaystyle\frac{{\dot{I}}}{\displaystyle\frac{1}{R}+j{\omega}C}\tag{19}\\
\\
{\dot{I}}&=&\frac{{\dot{V}}}{{\dot{Z}}}=\left(\displaystyle\frac{1}{R}+j{\omega}C\right){\dot{V}}\tag{20}
\end{eqnarray}
また、インピーダンスの大きさ\(Z\)は「電圧の大きさ\(V\)と電流の大きさ\(I\)の比」であり次式で表されます。
\begin{eqnarray}
Z=|{\dot{Z}}|=\frac{V}{I}=\displaystyle\frac{1}{\displaystyle\sqrt{\left(\displaystyle\frac{1}{R}\right)^2+\left({\omega}C\right)^2}}\tag{21}
\end{eqnarray}
したがって、「RC並列回路にかかる電圧の大きさ\(V\)」と「RC並列回路に流れる電流の大きさ\(I\)」は次式で表すことができます。
\begin{eqnarray}
V&=&ZI=\displaystyle\frac{1}{\displaystyle\sqrt{\left(\displaystyle\frac{1}{R}\right)^2+\left({\omega}C\right)^2}}I=\displaystyle\frac{I}{\displaystyle\sqrt{\left(\displaystyle\frac{1}{R}\right)^2+\left({\omega}C\right)^2}}\tag{22}\\
\\
I&=&\frac{V}{Z}=\displaystyle\frac{V}{\displaystyle\frac{1}{\displaystyle\sqrt{\left(\displaystyle\frac{1}{R}\right)^2+\left({\omega}C\right)^2}}}=V\displaystyle\sqrt{\left(\displaystyle\frac{1}{R}\right)^2+\left({\omega}C\right)^2}\tag{23}
\end{eqnarray}
まとめ
この記事ではRC並列回路の『合成インピーダンス』について、以下の内容を説明しました。
- RC並列回路の『合成インピーダンス』の式・大きさ・ベクトル図・インピーダンス角
お読み頂きありがとうございました。
あわせて読みたい
直列回路と並列回路の『合成インピーダンス』については下記の記事で詳しく説明しています。興味のある方は下記のリンクからぜひチェックをしてみてください。
当サイトでは電気に関する様々な情報を記載しています。当サイトの全記事一覧は以下のボタンから移動することができます。
また、記事下に当サイトの人気記事を記載しています。ご参考になれば幸いです。