PFC回路(力率改善回路)はインダクタ電流の電流波形により3つのモード(CCM・BCM・DCM)があります。
この記事では3つのモードの特徴や違いについて説明します。
PFC回路の動作モード
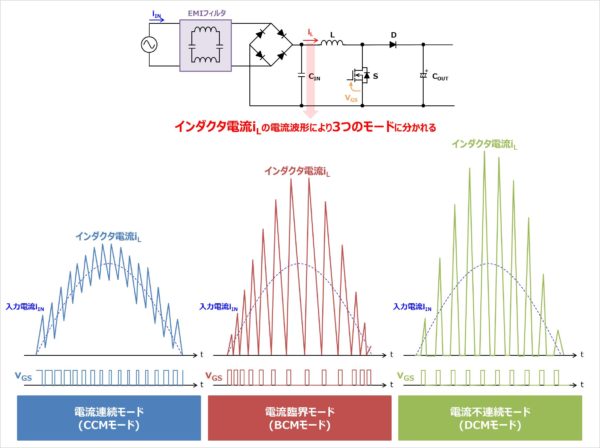
PFC回路はインダクタ電流iLの電流波形により以下の3つのモードがあります。
- 電流連続モード(CCMモード)
- 電流臨界モード(BCMモード)
- 電流不連続モード(DCMモード)
インダクタ電流が連続となるモードです。
インダクタ電流が0Aになった時にMOSFETをオンするモードです。
インダクタ電流が不連続となるモードです。
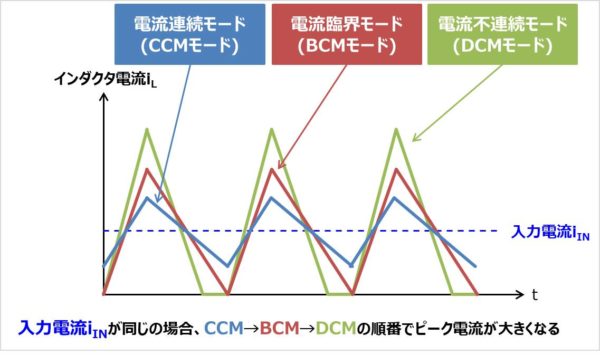
下図は3つのモードの入力電流が等しい場合におけるインダクタ電流の比較図となっています。電流連続モード(CCMモード)が最もピーク電流が小さく、電流不連続モード(DCMモード)が最もピーク電流が大きくなります。そのため、一般的には、出力電力が大きい場合には、ピーク電流が小さくなる電流連続モード(CCMモード)を使用します。
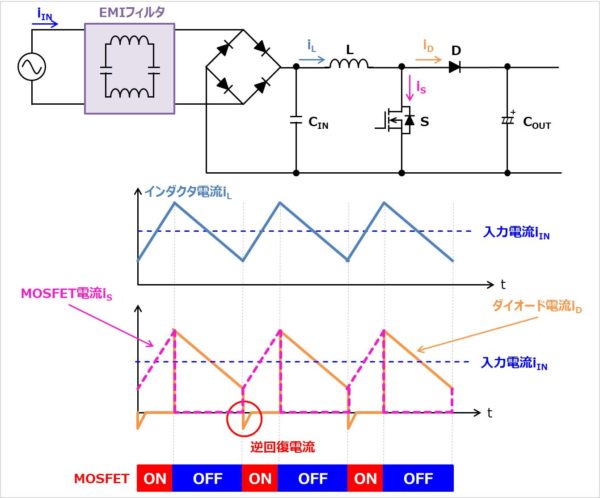
次に電流連続モード(CCMモード)における動作を説明します。MOSFETがオンの時にはインダクタとMOSFETに流れています。この時、インダクタ電流iLが増加します。一方、MOSFETがオフになると、インダクタとダイオードに電流が流れます。この時、インダクタ電流iLが減少します。また、電流連続モード(CCMモード)ではダイオードに電流が流れている状態でMOSFETがオンするため、ダイオードは強制的にオフされます。その結果、逆回復電流とそれに伴うスイッチングノイズが発生します。そのため、電流連続モード(CCMモード)では逆回復特性の良いダイオードを使用することが望まれます。
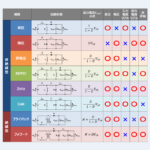
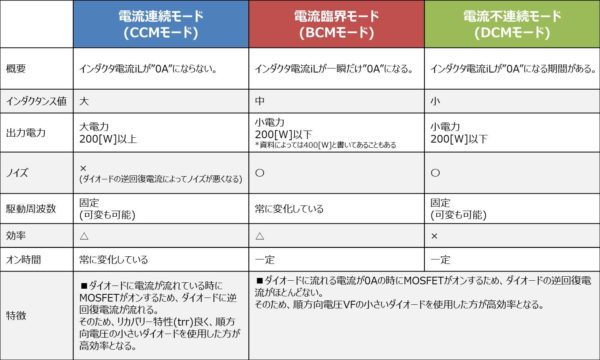
また、後ほど詳しく説明しますが、各モードの比較を表でまとめると以下のようになります。200W以上の電力では電流連続モード(CCMモード)が、200W以下の電力では電流臨界モード(BCMモード)が多く使われています。
ではこれから各モードの説明を詳しくします。
電流連続モード(CCMモード)
電流連続モードとはその名の通り、インダクタ電流が連続となるモードです。200W以上の高出力においてはPFCの動作モードでは最も一般的となっています。インダクタ電流が0Aになる前にMOSFETをオンしているため、インダクタ電流が0Aになりません。
電流連続モードはCCMモードとも呼ばれています。CCMとは「Continuous Current Mode/Continuous Conduction Mode」の頭文字を取ったものです。「Continuous」は「連続」という意味です。
電流連続モード(CCMモード)の制御方法
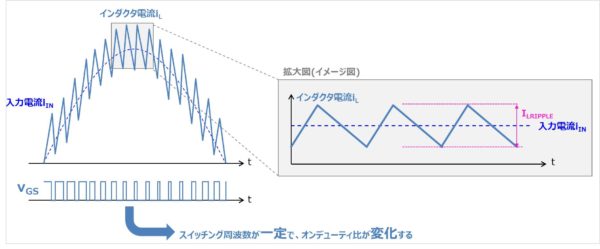
一般的には電流連続モード(CCMモード)はスイッチング周波数が一定であり、オンデューティ比を変化させています。この時、インダクタの平均電流が正弦波になるように電流波形を制御しています。そのため、電流連続モードの制御は平均電流モード制御(Average Current Mode Contorl)と呼ばれています。
電流連続モード(CCMモード)のメリット
- インダクタ、MOSFET、ダイオードに流れる電流の実行値とピーク値が小さい。
- インダクタに流れる電流が連続なので、EMIフィルタを小さくできる。
- スイッチング周波数が一定なので、インダクタの設計とEMIフィルタの設計が容易である。
- MOSFETのピーク電流が小さいため、ターンオフ時の損失は電流臨界モード(BCMモード)と電流不連続モード(DCMモード)よりも小さくなる。
- インダクタ電流のリプル電流ILRIPPLEは設計者が自由に決める(インダクタンスを大きくすればリプル電流が小さくなる)ことができるため、MOSFETのピーク電流は設計次第で変化する。
→そのため、MOSFETやインダクタの導通損失が小さくなります。これが高出力で電流連続モード(CCMモード)が使われる主な理由です。
電流連続モード(CCMモード)のデメリット
- ダイオードに電流が流れている状態でMOSFETがオンするため、ダイオードが強制的にオフされる。そのため、逆回復電流が流れスイッチングノイズが発生する。そのため、効率を良くするためには逆回復時間(リカバリー時間)trrの小さいダイオードを使用する必要がある。
- 制御ICのピン数が一般的には多いため、電流臨界モード(BCMモード)と電流不連続モード(DCMモード)よりも部品点数が多くなる。
→一般的にはファストリカバリダイオードを使用します。なお、SiCやGaNのダイオードを用いれば逆回復時間が桁違いに小さいため、逆回復電流を改善することができます。
電流臨界モード(BCMモード)
インダクタ電流が0Aになった時にMOSFETをオンさせるモードです。電流連続モード(CCMモード)と電流不連続モード(DCMモード)の境界のモードです。200W以下の出力においてはPFCの動作モードでは最も一般的となっており、小型の電源では最も多く使われています。インダクタ電流が0AになってからMOSFETをオンします。その結果、MOSFETの電流波形とダイオードの電流波形は三角波となります。
電流連続モードはBCMモードとも呼ばれています。BCMとは「Boundary Current Mode」の頭文字を取ったものです。「Boundary」は「境界」という意味です。また、以下の用語でも呼ばれています。
- CRMモード
- TCMモード
- TMモード
Critical Current Mode、Critical Conduction Mode
Triangular Current Mode、Transaction Conduction Mode
Transition Mode
電流臨界モード(BCMモード)の制御方法
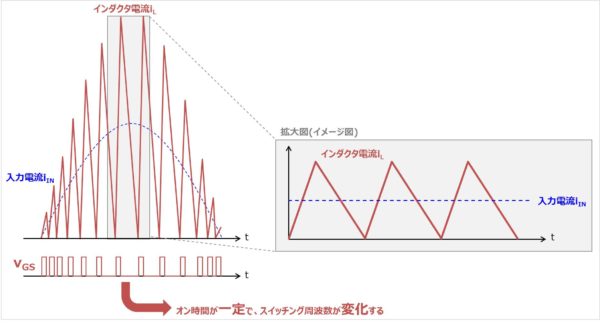
一般的には電流臨界モード(BCMモード)は、入力電圧と入力電流が一定の場合、MOSFETのオン時間TONが一定であり、スイッチング周波数を変化させています。インダクタに流れる電流のピーク値をプロットすると、正弦波になることから、ピーク電流モード制御と呼ばれています。
制御の特徴1.入力電圧(正弦波)の1周期でスイッチング周波数が常に変化する
入力コンデンサCINにかかる電圧は入力電圧をブリッジダイオードで整流した全波整流波となっています。また、インダクタ電流のピーク値は全波整流波の電圧に比例します。そのため、全波整流波の電圧が高い時には、インダクタ電流のピーク値が高くなります。このインダクタ電流を0Aにするためにはオフ時間を長くする必要があります。すなわち、全波整流波の電圧が高い時には、スイッチング周波数が低くなります。逆に、全波整流波の電圧が高い時には、スイッチング周波数が高くなります。
制御の特徴2.出力電流が小さい場合(軽負荷の場合)には、スイッチング周波数が高くなる
出力電流が小さい場合、入力電流が小さくなります。そのため、インダクタ電流のピーク値が小さくなります。その結果、短いオン時間でインダクタ電流のピーク値に達するようになります。また、インダクタ電流を0Aにするオフ時間も短くなります。すなわち、出力電流が小さい場合(軽負荷の場合)、MOSFETのオン時間とオフ時間が短くなるため、スイッチング周波数が高くなります。
制御の特徴3.入力電圧が高い場合には、スイッチング周波数が高くなる
入力電圧が高い場合、入力電流が小さくなります。そのため、インダクタ電流のピーク値が小さくなります。その結果、短いオン時間でインダクタ電流のピーク値に達するようになります。また、インダクタ電流を0Aにするオフ時間も短くなります。すなわち、入力電圧が小さい場合、MOSFETのオン時間とオフ時間が短くなるため、スイッチング周波数が高くなります。
電流臨界モード(BCMモード)のメリット
- 制御ICのピン数が電流連続モード(CCMモード)より一般的には少ないため、回路構成が簡単で安価となる。
- 力率が非常に良い。
- ダイオード電流が0Aになった時点でMOSFETがオンするため、ダイオードに逆回復電流が流れない。そのため、ファストリカバリーダイオードを使用する必要がない。
- MOSFETのターンオン時はインダクタ電流が0Aであり、スイッチング遷移時に電流と電圧の重なりがなくなるため、ターンオン損失がない。
電流臨界モード(BCMモード)のデメリット
- インダクタ、MOSFET、ダイオードに流れる電流の実行値とピーク値が大きいため、導通損失が大きくなる。
- MOSFETのターンオフ時、入力電流の2倍の電流がMOSFETに流れているため、ターンオフ損失が大きくなる。
- スイッチング周波数が負荷によって変化する。
- インダクタ電流に流れるリプル電流が大きいため、EMIフィルタを大きくする必要がある。
→軽負荷時にスイッチング周波数が高くなるため、MOSFETのスイッチング損失が増加し、効率が悪化します。
電流不連続モード(DCMモード)
インダクタ電流が不連続となるモードです。インダクタ電流が1周期毎に0Aになる期間があります。
電流不連続モードはDCMモードとも呼ばれています。DCMとは「Discontinuous Current Mode/Discontinuous Conduction Mode」の頭文字を取ったものです。「Discontinuous」は「不連続」という意味です。
電流不連続モード(DCMモード)の制御方法
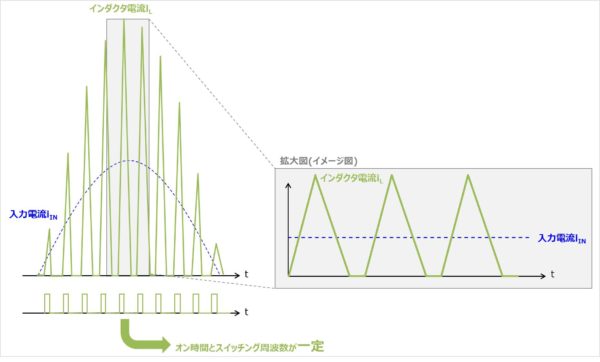
一般的には電流不連続モード(DCMモード)は、入力電圧と入力電流が一定の場合、MOSFETのオン時間TONとスイッチング周波数が一定となります。電流不連続モード(DCMモード)では昇圧比(VOUT/vIN)が大きいほど、入力電流が正弦波に近くなります。そのため、入力電圧vINによって力率が変わり、入力電圧vINが高い時は力率が悪くなります。
電流不連続モード(DCMモード)のメリット
- 制御ICのピン数が電流連続モード(CCMモード)より一般的には少ないため、回路構成が簡単で安価となる。
- ダイオード電流が0Aになった時点でMOSFETがオンするため、ダイオードに逆回復電流が流れない。そのため、ファストリカバリーダイオードを使用する必要がない。
- MOSFETのターンオン時はインダクタ電流が0Aであり、スイッチング遷移時に電流と電圧の重なりがなくなるため、ターンオン損失がない。
電流不連続モード(DCMモード)のデメリット
- インダクタ、MOSFET、ダイオードに流れる電流の実行値とピーク値が大きいため、導通損失が大きくなる。
- 力率は電流臨界モード(BCMモード)と比較すると悪い。
- MOSFETのターンオフ時、入力電流の2倍以上の電流がMOSFETに流れているため、ターンオフ損失が大きくなる。