交流回路において、理想的なコイル(インダクタ)の消費電力はゼロになります。
どうして、電流が流れているのに消費電力がゼロになるのでしょうか?
この記事では、コイル(インダクタ)の消費電力がゼロになる理由を『式』と『波形』で説明します。図を用いて分かりやすく説明するように心掛けていますので、ご参考になれば幸いです。
コイル(インダクタ)の消費電力がゼロになる理由を『式』で説明
理想的なコイル(インダクタ)の消費電力がゼロになる理由を『式』で説明します。
コイル(インダクタ)の消費電力は下記の手順(ステップ1,2)で求めることができます。
コイルの消費電力を求める手順
- コイル(インダクタ)の瞬時電力\(p_L\)を求める。
- 瞬時電力\(p_L\)を1周期で積分して平均化する。
ではこれから、コイル(インダクタ)の消費電力を計算してゼロになるのを確かめてみましょう。
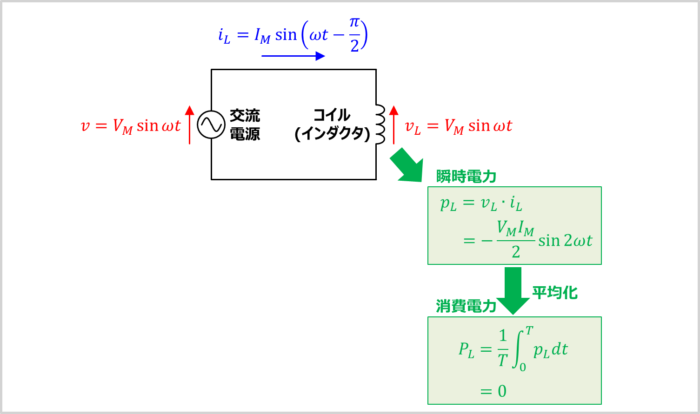
上図に示しているのは、交流電源\(v\)にコイル(インダクタ)のみを接続している回路です。
交流電源の電圧の最大値を\(V_M{\mathrm{[V]}}\)、角周波数を\({\omega}{\mathrm{[rad/s]}}\)、時間を\(t{\mathrm{[s]}}\)とすると、交流電源\(v\)は次式で表されます。
\begin{eqnarray}
v=V_M{\sin}{\omega}t{\;}{\mathrm{[V]}}\tag{1}
\end{eqnarray}
上図に示している回路は交流電源\(v\)にコイル(インダクタ)のみを接続しています。そのため、コイル(インダクタ)にかかる電圧\(v_L\)は交流電源\(v\)と等しくなるため、次式が成り立ちます。
\begin{eqnarray}
v_L=v=V_M{\sin}{\omega}t{\;}{\mathrm{[V]}}\tag{2}
\end{eqnarray}
「コイル(インダクタ)に流れる電流\(i_L\)」は「コイル(インダクタ)にかかる電圧\(v_L\)」よりも位相が\(90^{\circ}\left(\displaystyle\frac{{\pi}}{2}{\mathrm{rad}}\right)\)遅れます。そのため、コイルに流れる電流の最大値を\(I_M{\mathrm{[A]}}\)とすると、コイル(インダクタ)に流れる電流\(i_L\)は次式で表されます。
\begin{eqnarray}
i_L=I_M{\sin}\left({\omega}t-\frac{{\pi}}{2}\right){\mathrm{[A]}}\tag{3}
\end{eqnarray}
あわせて読みたい
「コイル(インダクタ)に流れる電流\(i_L\)」が「コイル(インダクタ)にかかる電圧\(v_L\)」よりも位相が\(90^{\circ}\left(\displaystyle\frac{{\pi}}{2}{\mathrm{rad}}\right)\)遅れる理由については、下記の記事で詳しく説明しています。興味のある方は下記のリンクからぜひチェックをしてみてください。 続きを見る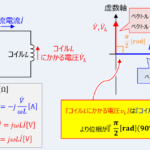
コイルLのみ接続した場合の『位相』と『ベクトル図』を解説!【交流回路】
したがって、コイル(インダクタ)の瞬時電力\(p_L{\mathrm{[W]}}\)は「(2)式の\(v_L\)」と「(3)式の\(i_L\)」の積となるため、次式で表されます。
\begin{eqnarray}
p_L&=&v_L{\;}{\cdot}{\;}i_L\\
\\
&=&V_M{\sin}{\omega}t{\;}{\cdot}{\;}I_M{\sin}\left({\omega}t-\frac{{\pi}}{2}\right)\\
\\
&=&V_MI_M{\sin}{\omega}t{\;}{\sin}\left({\omega}t-\frac{{\pi}}{2}\right){\mathrm{[W]}}\tag{4}
\end{eqnarray}
ここで、(4)式を少し整理してみましょう。
まず、三角関数の加法定理を用いると、(4)式にある「sin」は次式に変形することができます。
\begin{eqnarray}
{\sin}\left({\omega}t-\frac{{\pi}}{2}\right)&=&{\sin}{\omega}t{\;}{\cos}\frac{{\pi}}{2}-{\cos}{\omega}t{\;}{\sin}\frac{{\pi}}{2}\\
\\
&=&{\sin}{\omega}t{\;}{\cdot}{\;}0-{\cos}{\omega}t{\;}{\cdot}{\;}1\\
\\
&=&-{\cos}{\omega}t\tag{5}
\end{eqnarray}
【参考】三角関数の加法定理
\begin{eqnarray}
{\sin}(α+β)&=&{\sin}α{\;}{\cos}β+{\cos}α{\;}{\sin}β\\
\\
{\sin}(α-β)&=&{\sin}α{\;}{\cos}β-{\cos}α{\;}{\sin}β\\
\\
{\cos}(α+β)&=&{\cos}α{\;}{\cos}β-{\sin}α{\;}{\sin}β\\
\\
{\cos}(α-β)&=&{\cos}α{\;}{\cos}β+{\sin}α{\;}{\sin}β\\
\\
{\tan}(α+β)&=&\frac{{\tan}α+{\tan}β}{1-{\tan}α{\;}{\tan}β}\\
\\
{\tan}(α-β)&=&\frac{{\tan}α-{\tan}β}{1+{\tan}α{\;}{\tan}β}
\end{eqnarray}
そのため、(5)式を(4)式に代入すると、コイルの瞬時電力\(p_L{\mathrm{[W]}}\)は次式となります。
\begin{eqnarray}
p_L&=&V_MI_M{\sin}{\omega}t{\;}{\sin}\left({\omega}t-\frac{{\pi}}{2}\right)\\
\\
&=&V_MI_M{\sin}{\omega}t{\;}{\cdot}{\;}(-{\cos}{\omega}t)\\
\\
&=&-V_MI_M{\sin}{\omega}t{\;}{\cos}{\omega}t{\;}{\mathrm{[W]}}\tag{6}
\end{eqnarray}
(6)式に三角関数の倍角公式を用いると、コイルの瞬時電力\(p_L{\mathrm{[W]}}\)は次式に変形することができます。
\begin{eqnarray}
p_L&=&-V_MI_M{\sin}{\omega}t{\;}{\cos}{\omega}t\\
\\
&=&-V_MI_M{\;}{\cdot}{\;}\frac{{\sin}2{\omega}t}{2}\\
\\
&=&-\frac{V_MI_M}{2}{\sin}2{\omega}t{\;}{\mathrm{[W]}}\tag{7}
\end{eqnarray}
【参考】三角関数の倍角公式
\begin{eqnarray}
{\sin}2α&=&{\sin}α{\;}{\cos}α+{\cos}α{\;}{\sin}α\\
\\
&=&2{\sin}α{\;}{\cos}α\\
\\
{\Leftrightarrow}{\sin}α{\;}{\cos}α&=&\frac{{\sin}2α}{2}
\end{eqnarray}
(7)式をコイル(インダクタ)にかかる電圧\(v_L\)の1周期\(T\)で積分して、平均したものがコイル(インダクタ)の消費電力(平均電力)\(P_L{\mathrm{[W]}}\)となります。そのため、消費電力\(P_L\)は次式となります。
\begin{eqnarray}
P_L&=&\frac{1}{T}{\displaystyle\int}_0^Tp_Ldt\\
\\
&=&\frac{1}{T}{\displaystyle\int}_0^T\left(-\frac{V_MI_M}{2}{\sin}2{\omega}t\right)dt\tag{8}
\end{eqnarray}
ここで、\({\omega}=2{\pi}f\)を用いると、周期\(T\)は次式で表すことができます。
\begin{eqnarray}
T=\frac{1}{f}=\frac{2{\pi}}{{\omega}}\tag{9}
\end{eqnarray}
(9)式を(8)式に代入すると、消費電力\(P_L\)は次式となります。
\begin{eqnarray}
P_L&=&\frac{1}{\displaystyle\frac{2{\pi}}{{\omega}}}{\displaystyle\int}_0^{\displaystyle\frac{2{\pi}}{{\omega}}}\left(-\frac{V_MI_M}{2}{\sin}2{\omega}t\right)dt\\
\\
&=&\frac{{\omega}}{2{\pi}}{\;}{\cdot}{\;}\left(-\frac{V_MI_M}{2}\right){\displaystyle\int}_0^{\displaystyle\frac{2{\pi}}{{\omega}}}{\sin}2{\omega}t{\;}dt\\
\\
&=&-\frac{{\omega}V_MI_M}{4{\pi}}{\displaystyle\int}_0^{\displaystyle\frac{2{\pi}}{{\omega}}}{\sin}2{\omega}t{\;}dt\\
\\
&=&-\frac{{\omega}V_MI_M}{4{\pi}}\left[-\frac{{\cos}2{\omega}t}{2{\omega}}\right]_0^{\displaystyle\frac{2{\pi}}{{\omega}}}\\
\\
&=&\frac{{\omega}V_MI_M}{4{\pi}{\;}{\cdot}{\;}2{\omega}}\left[{\cos}2{\omega}t\right]_0^{\displaystyle\frac{2{\pi}}{{\omega}}}\\
\\
&=&\frac{V_MI_M}{8{\pi}}\left\{{\cos}\left(2{\omega}{\;}{\cdot}{\;}\frac{2{\pi}}{{\omega}}\right)-{\cos}\left(2{\omega}{\;}{\cdot}{\;}0\right)\right\}\\
\\
&=&\frac{V_MI_M}{8{\pi}}\left({\cos}4{\pi}-{\cos}0\right)\\
\\
&=&\frac{V_MI_M}{8{\pi}}\left(1-1\right)\\
\\
&=&0{\;}{\mathrm{[W]}}\tag{10}
\end{eqnarray}
(10)式から分かるように、計算すると、コイル(インダクタ)の消費電力\(P_L\)がゼロになることが分かります。
では次に、理想的なコイル(インダクタ)の消費電力がゼロになる理由を『波形』で説明します。
補足
- 消費電力は『有効電力』とも呼ばれています。
コイル(インダクタ)の消費電力がゼロになる理由を『波形』で説明
先ほど、「コイル(インダクタ)にかかる電圧\(v_L\)」と「コイル(インダクタ)に流れる電流\(i_L\)」と「コイル(インダクタ)の瞬時電力\(p_L\)」を計算で求めました。
- コイル(インダクタ)にかかる電圧\(v_L\)
\begin{eqnarray}
v_L=V_M{\sin}{\omega}t{\;}{\mathrm{[V]}}
\end{eqnarray} - コイル(インダクタ)に流れる電流\(i_L\)
\begin{eqnarray}
i_L=I_M{\sin}\left({\omega}t-\frac{{\pi}}{2}\right){\mathrm{[A]}}
\end{eqnarray} - コイル(インダクタ)の瞬時電力\(p_L\)
\begin{eqnarray}
p_L=-\frac{V_MI_M}{2}{\sin}2{\omega}t{\;}{\mathrm{[W]}}
\end{eqnarray}
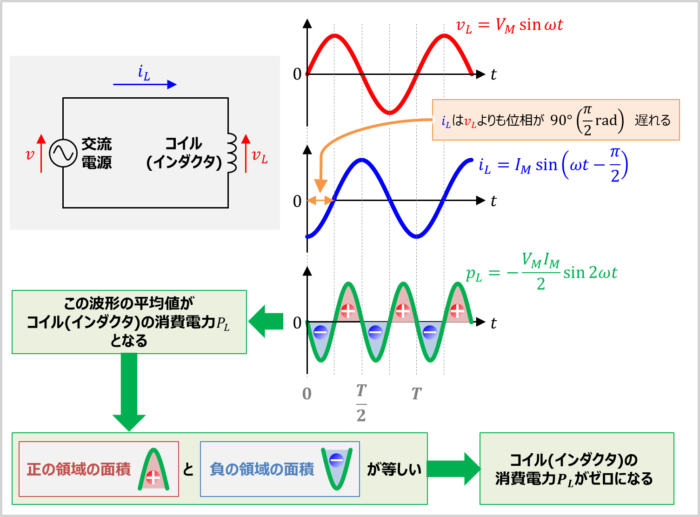
これらの式を波形で描くと上図のようになります。
「コイル(インダクタ)の瞬時電力\(p_L\)」は最大値が「\(\displaystyle\frac{V_MI_M}{2}\)」の正弦波となり、周波数は「コイル(インダクタ)にかかる電圧\(v_L\)」や「コイル(インダクタ)に流れる電流\(i_L\)」の2倍となります。そのため、「コイル(インダクタ)の瞬時電力\(p_L\)」の1周期は\(\displaystyle\frac{T}{2}\)となります。
この瞬時電力\(p_L\)の平均値が、コイル(インダクタ)の消費電力\(P_L\)となります。
ここで、「コイル(インダクタ)の瞬時電力\(p_L\)」の波形を見ると、正と負を繰り返しています。また、「正の領域の面積」と「負の領域の面積」は等しくなります。そのため、「コイル(インダクタ)の瞬時電力\(p_L\)」を平均するとゼロになります。すなわち、コイル(インダクタ)の消費電力\(P_L\)がゼロになります。
ちなみに、コイル(インダクタ)の瞬時電力\(p_L\)が正の時は交流電源\(v\)がコイル(インダクタ)に電力を送っています。一方、コイル(インダクタ)の瞬時電力\(p_L\)が負の時はコイル(インダクタ)が交流電源\(v\)に電力を送り返しています。交流電源\(v\)が電力を送っても全て送り返されるので、この電力は「無効電力」と呼ばれています。
あわせて読みたい
交流回路の電力には「有効電力(消費電力)」・「無効電力」・「皮相電力」があります。各用語の違いについては下記の記事で詳しく説明しています。興味のある方は下記のリンクからぜひチェックをしてみてください。 続きを見る
有効電力・無効電力・皮相電力の違いを分かりやすく解説します!
補足
- (8)式ではコイル(インダクタ)にかかる電圧\(v_L\)の1周期\(T\)で積分して、平均することで、コイル(インダクタ)の消費電力\(P_L\)を求めましたが、コイル(インダクタ)の瞬時電力\(p_L\)の1周期\(\displaystyle\frac{T}{2}\)で積分して、平均しても、コイル(インダクタ)の消費電力\(P_L\)を求めることができます。
コイル(インダクタ)の瞬時電力\(p_L\)の波形の描き方
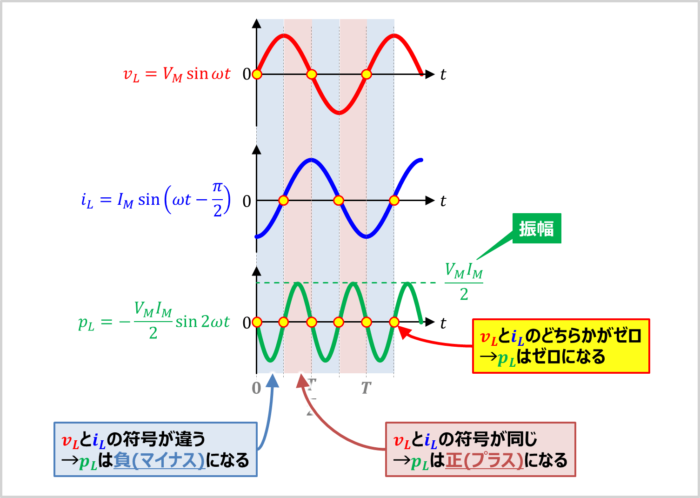
コイル(インダクタ)の瞬時電力\(p_L\)の波形の描き方についてもう少し詳しく説明します。
- 「電圧\(v_L\)」と「電流\(i_L\)」の符号が違う時(片方が「正」で片方が「負」の時)
- 「瞬時電力\(p_L\)」は負(マイナス)になります。
- 「電圧\(v_L\)」と「電流\(i_L\)」の符号が同じ時(両方が「正」または「負」の時)
- 「瞬時電力\(p_L\)」は正(プラス)になります。
- 「電圧\(v_L\)」と「電流\(i_L\)」のどちらかがゼロの時
- 「瞬時電力\(p_L\)」はゼロになります。
なお、「瞬時電力\(p_L\)」の振幅は(7)式より「\(\displaystyle\frac{V_MI_M}{2}\)」になります。
まとめ
この記事では『コイル(インダクタ)の消費電力がゼロになる理由』について、以下の内容を説明しました。
- コイル(インダクタ)の消費電力がゼロになる理由を『式』で説明
- コイル(インダクタ)の消費電力がゼロになる理由を『波形』で説明
- コイル(インダクタ)の瞬時電力\(p_L\)の波形の描き方
お読み頂きありがとうございました。
当サイトでは電気に関する様々な情報を記載しています。当サイトの全記事一覧は以下のボタンから移動することができます。
また、記事下に当サイトの人気記事を記載しています。ご参考になれば幸いです。