差動増幅回路は2つの入力電圧の差を増幅する回路です。差動増幅回路に接続されている4つの抵抗を調整することで、自由に増幅率を設定することができる特徴があります。
この差動増幅回路は英語では『Differential amplifier』と呼びます。日本語では回路ではなく『器』を用いて、『差動増幅器』とも呼ばれています。
ではこれから差動増幅回路の原理と式の導出について説明します。
差動増幅回路の『原理』と『式』
差動増幅回路の式を導出してみましょう。
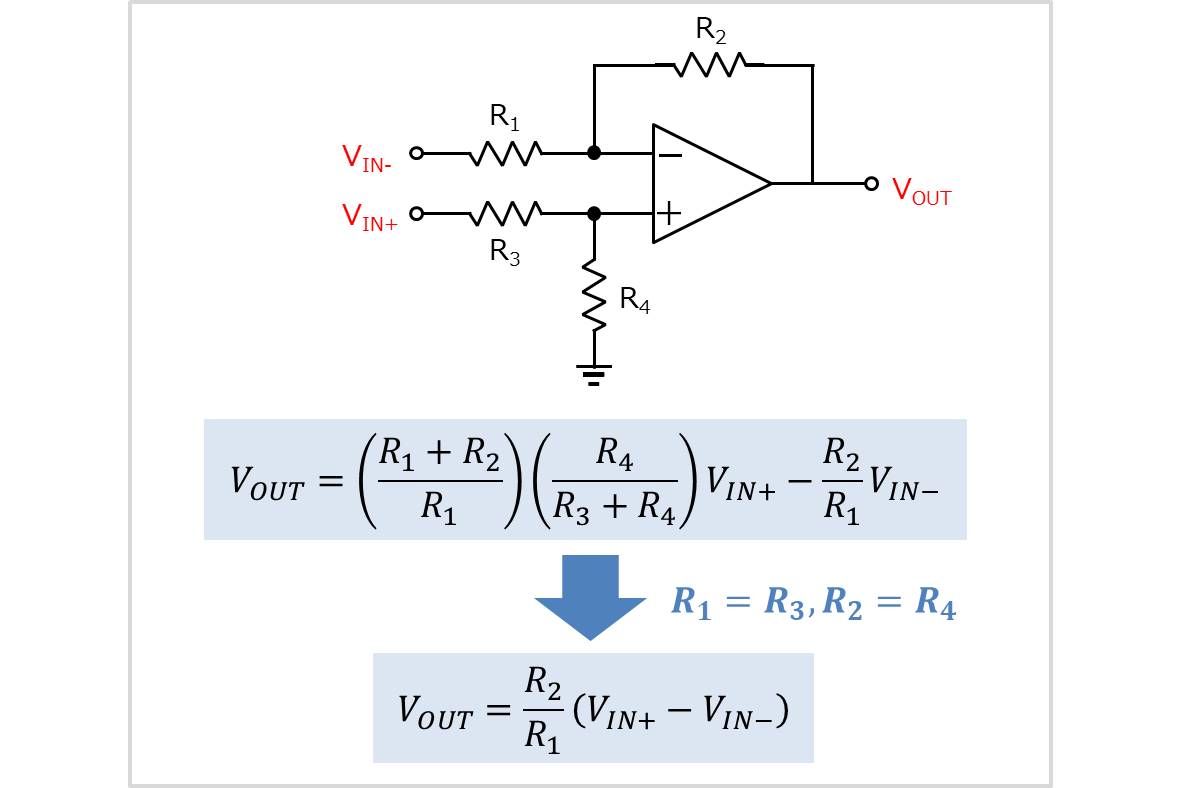
下図に回路図を示します。
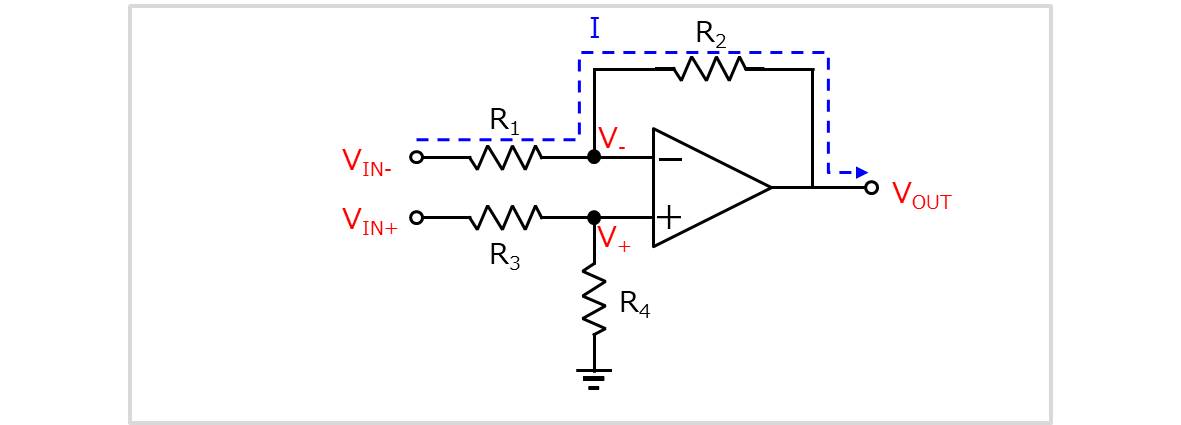
差動増幅回路のプラス入力をVIN+、マイナス入力をVIN-、オペアンプのプラス端子をV+、オペアンプのマイナス端子をV-とします。
まず、オペアンプのプラス端子V+を求めます。
差動増幅回路のプラス入力VIN+を抵抗R3とR4で分圧した電圧となるので、
\begin{eqnarray}
V_{+}=\frac{R_4}{R_3+R_4}V_{IN+}
\end{eqnarray}
となります。
次に、オペアンプのマイナス端子V-の電圧を求めます。
オペアンプのマイナス端子V-には電流が流れ込まないため、抵抗R1に流れる電流Iは抵抗R2にも流れます。したがって、
\begin{eqnarray}
\frac{V_{IN-}-V_{-}}{R_1}=\frac{V_{-}-V_{OUT}}{R_2}\\
V_{-}=\frac{R_1{V_{OUT}}+R_2{V_{IN-}}}{R_1+R_2}
\end{eqnarray}
となります。
オペアンプのマイナス端子V-とオペアンプのプラス端子V+の電圧は仮想接地で等しいため、
\begin{eqnarray}
V_{-}=V_{+}
\end{eqnarray}
となります。
したがって、
\begin{eqnarray}
\frac{R_1{V_{OUT}}+R_2{V_{IN-}}}{R_1+R_2}=\frac{R_4}{R_3+R_4}V_{IN+}\\
\Leftrightarrow\frac{R_1}{R_1+R_2}{V_{OUT}}=\frac{R_4}{R_3+R_4}V_{IN+}-\frac{R_2}{R_1+R_2}{V_{IN-}}
\end{eqnarray}
となります。
上式を変形すると、
{V_{OUT}}=\left(\frac{R_1+R_2}{R_1}\right)\left(\frac{R_4}{R_3+R_4}\right)V_{IN+}-\frac{R_2}{R_1}{V_{IN-}}
\end{eqnarray}
となります。
ここで、この式を簡単にするために、R1=R3,R2=R4とする(実使用でもこのように設計する)と、上の複雑な式は
{V_{OUT}}=\frac{R_2}{R_1}\left({V_{IN+}}-{V_{IN-}}\right)
\end{eqnarray}
となります。
この式より、差動増幅回路はプラス入力VIN+とマイナス入力VIN-の差電圧を抵抗R1(=R3)とR2(=R4)の比で増幅した値が出力電圧VOUTになることが分かります。
差動増幅回路の『用途』
様々な用途に用いられるが、微小信号を増幅する心電計、ひずみゲージ等の精密計測分野や通信分野で使用されます。
また、負荷電流を測定する回路にも用いられていることがあります。